RNN 的基础
背景问题
我们有时候需要处理一些 _时间序列数据_,比如 股票预测,天气预测,根据前面单词预测后续一个单词等场景。NN(Neural Network) 在处理这些问题,有他的局限性。RNN (Recurrent Neural Network),就是为了用于处理这些问题。
原理
一句话:能够记住前 X 步,离当前时间越近的,越记得深刻,即越能影响当前步的输出。
里面有几层意思:
- 当前步输出,与前 X 步的记忆构成
- 前 X 步的输入,就构成了 前 X 步的记忆
- 前 X 步的记忆,X 越小,权重越大,越能影响当前步的输出
和人的记忆就很像,越近的事件,当然记得越清了,越往前倒,就记得越模糊。
简单的示意图,颜色越红,就是记得越清楚的。越往后,“what” 这个单词就已经不记得了。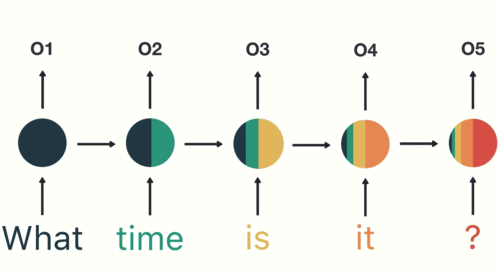
💡 所以搞清清楚 记忆,输入,输出,时间步 之间的关系,是 RNN 的关键。(NN 就没有 记忆 和 时间步 的概念)
时间步,就是表示时间序列。比如 股市指标的每秒钟时刻,天气浮动的每天时刻,一句话中的每个单词的前后顺序时刻,他们都是有先后关系的。
记忆,就好像 **每个时间步 **的一个内存,他记录着当前步的信息。我们可以使用更加专业的 隐状态(Hidden State)来表示。他随着时间步的递进,里面保存的消息慢慢弱化,直至消失。
原理图
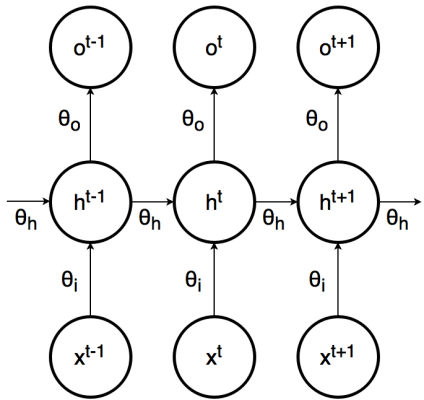
上述是 RNN 的原理图。
h: 是隐状态,x: 是输入,o: 是输出, 上面 3 个变量都是与时间步相关的,有时间标注。
图中的意思是: t 时刻的 h(隐状态),由 t-1 时刻的 h(隐状态)和 t 时刻的 x(输入)生成;t 时刻的 o(输出),由 t 时刻的 h(隐状态)生成。
总结成下面的两个公式:
$h_t = f(x_t, h_{t-1})$
$o_t = g(h_t)$
因为 又可以展开来 $[ h_{t-1} = f(x_{t-1}, h_{t-2})]$ ,且 $h_{t-2}$ 也同样展开,这样延续下去,就可以无限展开。
因为硬件限制和计算限制,我们会有 时间步 sequence 的概念,就是当前步的预测,仅仅是与前 n 步的隐状态相关,n 就是 sequence 的意思。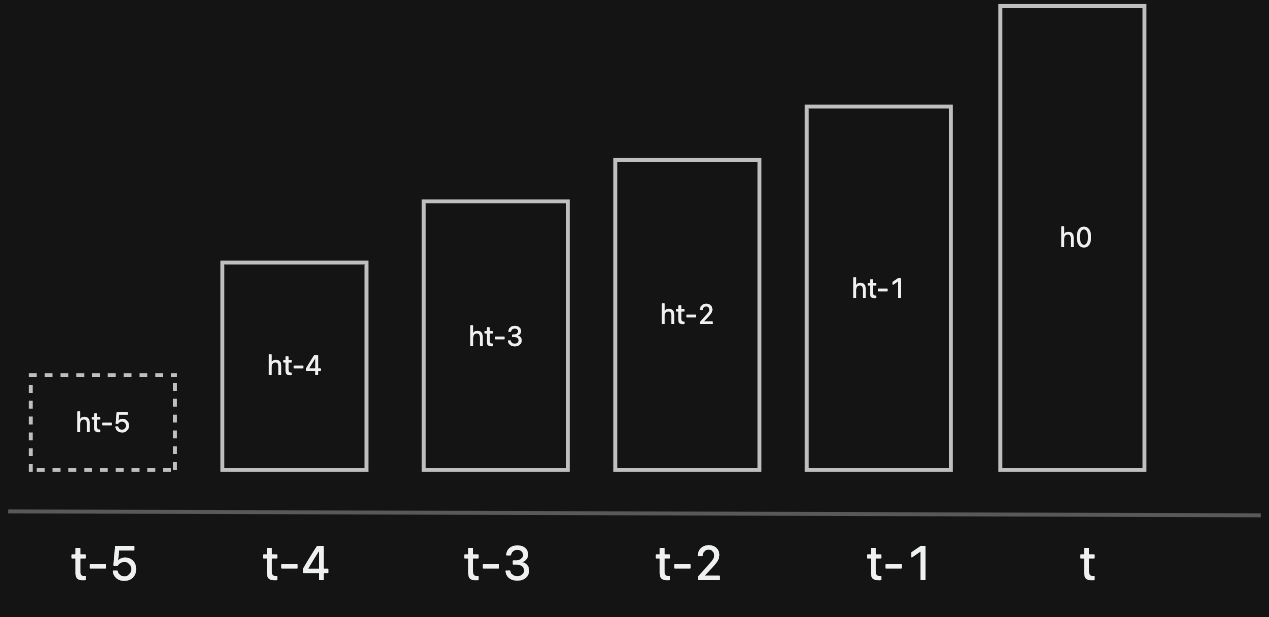
比如上图, sequence = 4, 长方形就是 隐状态,长度就是权重,越往左边,代表时间越久远,长度越矮,隐状态的权重越低。后面就会逐渐消失,所以 $h_{t-5}$ 对 $h_{t}$ 就不会再起作用了。
整体的公式非常的简单,可以记住,或者不用记忆,了解大致通俗的意思也是可以的。下面手写 RNN 的组件就把上面的公式 用代码展现出来。
手写 RNN 组件
根据上述的说明,形成 隐状态,是整个 RNN 的关键。手动实现 RNN 组件,就能了解他的内部运行机制是什么,利于理解他的原理。
手写组件 是为了对
RNN理解更加深入,后续都使用nn.RNN已经封装好的方法,不再使用手写 RNN。可运行 ipynb 文件链接。
下面是模拟有 10 个时刻( sequence 变量 )的输入数据,从 输入 形成 _隐状态_,并且从 隐状态 生成 输出 的过程。
1 | hidden_size = 20 # 记忆体的维度 |
上述就是一个最简单的 RNN 组件的实现逻辑,代码简单清晰,就不再一句句说明。
有几个需要注意的地方:
- [1] + [2] 即是 $f(x_t , h_{t-1})$ ,
torch.cat + i2h (full connect),输出 $h_t$当前 hidden_state。 - [3] 即是 $g(h_t)$ ,
i2o (hidden),输出 $o_t$当前输出,就是从当前hidden_state中来 - 上述代码整合到一个 model 里面,循环起来,就会是一个手写 RNN。
- [1] 中,
torch.cat((X, hidden), 1)是10 * input和hidden_state混合建立联系;当然可以 $f(x_1, hidden_0)$; $f(x_2, hidden_1)$; $f(x_3, hidden_2)$ … $f(x_10, hidden_9)$ 逐步堆叠hidden_state,这样会更加的直观。
例子 - 预测字符
目的:由“2 个字符”,预测下一个字符,同时连续猜测下去。
训练数据: “hello world”。
分析过程:
- 是 分类问题
- “2 个字符” 是一个有连续先后关系的输入,所以使用 RNN
- 定义 RNN 的时候 input_feature 和 output_feature 都是 8(字符串的所有唯一值总数是 8)
- X 的 sequence 可以定义成 2
详细的代码可以直接访问 ipynb 文件链接。
训练后的结果:
1 | # 测试模型 |
例子 - 预测 GS10
目的:由前 6 年数据,是否可以预测到 下一年的数据
训练数据: 美国国债收益率数据
分析过程:
- 是 回归问题
- “前 6 年数据” 预测下一年,就是有一个先后时间关系,所以使用 RNN
- 定义 RNN 的时候 input_feature 和 output_feature 都是 1(因为都是 数值上是 1 个值的回归)
- X 的 sequence 可以定义成 6
详细的代码可以直接访问 ipynb 文件链接。
训练后的结果: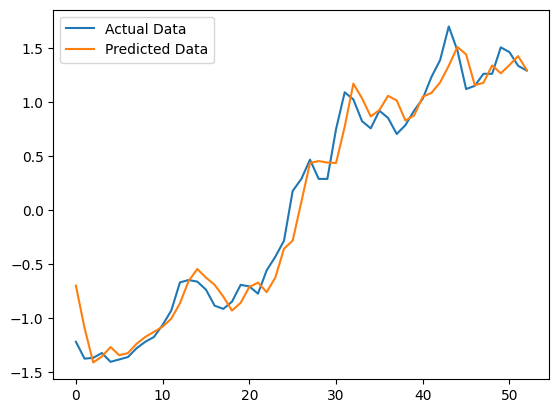
代码注意问题
集中在调用 nn.RNN 的问题
nn.RNN 的 input_feature 和 X 维度关系
在整个训练过程中,调整 model(X) 中的 X 维度,是最耗费时间的。如果语意上去理解了,那么用起来就会得心应手很多。
🔥 注意点
- 比如:一个 X.shape = (5,3,10),就可以理解成 5 个样本, 3 个时间步, 每个时间步有 10 个特征
X dim至少是 2 维,分别是(sequence, feature); 如果是 3 维,分别是(batch, sequence, feature);当然 也可以大于 2 维。
可运行文件链接
分类问题, X.dim = 3
1 |
|
同样是 rnn 的 model, X.dim = 2,一样可以运行,那么他就代表了 (seq_length, input_size)
1 | # 创建输入张量 (seq_length, input_size) |
回归问题,X.dim = 3
1 | # 回归的时候,基本上 1 个特征输入,1 个特征输出 |
这里的 output 需要经过一个全连接层,才最后转换成真正的 output。比如下面的代码,利用上面的回归例子,模拟 output_size =1 进行输出。
1 | #因为 RNN 层是没有 output_size,手动添加一个用于 output_size,比如回归输出 1 个特征 |
nn.RNN 的 target 与 y 的数据的处理
还是上述的例子,回归问题
1 | # 回归的时候,基本上 1 个特征输入,1 个特征输出 |
因为训练数据 X.shape = torch.Size([5, 3, 1]) 5 个样本, 3 个时间步, 每个时间步有 1 个特征,得到 output 都是 shape 与 X 一致,都是 torch.Size([5, 3, 1])。 但是我们仅仅是需要 最后时间步 的数据,才是我们想要的数据,即 output[:, -1, :] 就是我们想要的数据。
1 | #因为 RNN 层是没有 output_size,手动添加一个用于 output_size,比如回归输出 1 个特征 |
output[:, -1, :] 取 最后时间步 的数据。这是一种取巧的方法。
但是有时候,他并不是输出最后时间步的数据,所以记得留意构建 target(真实值) 的时候,注意是否从 model 出来的 y(预测值) 的维度之间的差异。
总结
隐状态
他是一个中间状态,介于输入和输出之间,或者说记忆力,他是 RNN 的一个关键概念。
他在后续的 decode&encode 的模型中,都发挥着重要的作用。
优点和场景
序列数据的任务适合使用 RNN。
- 股票预测
- 自然语言处理
缺点
- 时间步过长,会导致前面的隐状态会给忘记了
- 梯度消失和梯度爆炸
- 计算效率相对比较低